
PAP (MICROPAP) COMPACT ACOUSTIC POSITIONING SYSTEM
PAP is a small and compact acoustic positioning system for operation from a surface vessel to track ROV’s, tow fish, divers and any other subsea target at ranges to several thousand meters. The system operates in SSBL mode where it measures the distance and direction to subsea transponders and computes a 3D position in local coordinates or in geographical coordinates. µPAP is designed to be a portable system for easy installation on the vessel or other surface unit.The system can be used with all KONGSBERG manufactured transponders for depths down to 4000 meters.

µPAP also has full LBL calibration and positioning capabilities and can be used for position-box-in, calibration and positioning.
µPAP benefits from the Cymbal acoustic protocol providing wideband spread spectrum acoustic positioning and data communication.
A built in motion sensor or alternative Inertial Navigation System (INS) in the µPAP transducer compensates for vessel roll and pitch movements. To meet various demands from the market, the µPAP transducer is available in several versions with respect to built-in motion sensors and thereby physical size.
OUTLINE DIMENSIONS

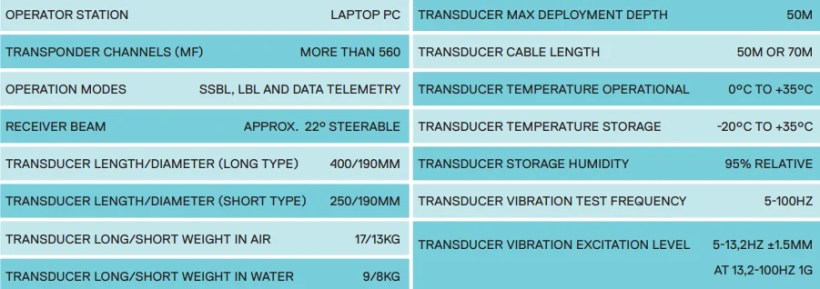
TECHNICAL SPECIFICATIONS

EASY TO INSTALL ONBOARD
There are only two basic requirements to install the system :
- The transducer needs to be lowered 1-3 meter below the keel.
- The transducer must be locked in orientation with the ‘zero-mark’ pointing forward.
Both requirements can be fulfilled with a rigid over-the-side pole which is locked in orientation relative to the vessel.

SYSTEM DESCRIPTION HARDWARE
µPAP’s Unique Transducer Units The µPAP series of transducers has many more elements than any of its competitors in the portable and low cost market. There is a a clear connection between system performance and the number of elements. More elements provide better acoustic redundancy, mathematical redundancy and improvement of the
Signal to Noise level.
All µPAP models form focused narrow listening beams towards the transponder(s) and use advanced signal processing techniques. The narrow beams suppress noise from other directions and provide improved Signal to Noise ratio (S/N). This is important to obtain improved angle measurement accuracy, longer range capabilities, and suppress the negative effect of acoustic reflections.
Vertical Reference Sensor
The µPAP measures the relative angle from the ship mounted transducer to the transponder. These measurements must be compensated for roll and pitch motions of the transducer, which is taken care of by an incorporated motion sensor and software. It is important to select the transducer model that best suits the actual application and operational water depth, since the error of these sensors contribute to the total position error budget and increases with operational range.
Operator and Display Unit – APOS
All µPAP systems use the same Operator Station (OS) and Man Machine Interface based on a Laptop PC. The OS performs all user interfaces, controls the transducer(s) and operates the Windows© based Acoustic Positioning Operating System (APOS). A built-in comprehensive and informative Online Help user guide is standard and describes a wide range of functions for acoustic positioning and data communication.
Navigation and External Interfaces
A µPAP system needs input from an external Heading Sensor and GNSS for providing global coordinates to the underwater targets. The data output line can be fed into a navigation system so that the subsea position data can be placed in a map.
Data from a sound velocity probe may be interfaced to make real time corrections for ray bending throughout the whole water column.
Transponders and Responders
The underwater targets to be positioned must have a transponder or a responder installed. The transponder operates acoustically while the responder requires a cable for triggering.
Pre-calibrated INS model saves cost and time
One model, the µPAP 201-MGC, combines the INS with SSBL in one integrated system providing a calibration free system. The transducer has a built-in inertial navigation system (INS) that computes high accuracy heading, roll, pitch, heave and position from three Ring Laser Gyros and three linear accelerometers.


POSITIONING PRINCIPLES AND SOFTWARE FUNCTIONS
Super (Ultra) Short Base Line underwater positioning principle
The SSBL (USBL) principle is clearly the simplest underwater positioning principle in operation. The Super Short Base Line refers to the very short distance between the active piezo-electric elements in the transducer, which is mounted under the vessel. The SSBL principle has the obvious advantage that it requires no installation of calibrated array transponders on the seabed. The targets that are to be positioned must be “marked” with a transponder. A SSBL system measures the horizontal and vertical angles together with the range to the transponder(s), giving a 3D position projection of the transponder(s) relative to the vessel (vessel’s reference point). The SSBL principle has an accuracy error increasing with range because the major error contribution comes from the angle measurement.
Long Base Line underwater positioning principle
The LBL principle is a little more complex in operation. The Long Base Line refers to the base lines between transponders spread out on the seabed. This array of transponders needs to be calibrated, i.e. all ranges between them need to be measured. There are automated and advanced functionalities in the positioning working on acoustic ranging and telemetry to find these ranges. Normally LBL gives more accurate positioning within the range of the transponder array and the LBL position accuracy is almost independent of depth. The µPAP systems have fully integrated LBL functionality as an option and will be very flexible when combining the advantages of both SSBL and LBL principles.
UNDERWATER DATA TELEMETRY
The µPAP can also be used for sending data information by acoustic pulses to or from transponders and as a two way modem to transfer data between a surface user computer and one or many underwater units.
Values from underwater sensors of any kind or from a customer provided data string can be sent acoustically to the surface µPAP for data presentation.
The modem application allows transparent data transfer between user equipment on the surface and underwater devices.
ACOUSTIC PROTOCOLS
Cymbal
Cymbal is the new acoustic protocol used for both positioning of subsea transponders in SSBL/LBL modeand data communication to and from transponders. The Cymbal technology utilises Phase Shift Keying (PSK) and Direct Sequence Spread Spectrum (DSSS) signals for positioning and data communication. The data communication speed is variable and can be adapted to the acoustic communication conditions; noise and multipath. DSSS is a wide band signal.
Due to the higher energy in its acoustic pulses the Cymbal protocol provides higher position accuracy, extremely accurate range measurements, longer range capabilities and higher data rate communication.
Continuous wave
PAP can also be used in the well known Frequency Shift Keying (FSK) mode with use of continuous waves (CF).
SYSTEM OVERVIEW
The µPAP system is extremely simple in configuration and can be installed onboard a vessel very quickly. The ?PAP system contains the following elements :
• Portable Operating Unit (normally a Laptop PC) with APOS Base Version, SSBL Function and Cymbal for ?PAP.
• Transducer; a series of µPAP portable versions.
• Cable for µPAP Transducer.
• Manuals for APOS and µPAP.
The µPAP system can be delivered with two sizes of transducers dependent on the built in Roll / Pitch sensor.
The µPAP 201 series transducers have the KONGSBERG MRU or MGC series inside, whilst the µPAP 200 transducers have a less advanced sensor inside.

PAP MODELS WITH ACCURACIES AND RANGE PERFORMANCES

*Position accuracy: 0.45% (1 Sigma, SNR > 20dB rel. 1µPa in bandwidth).
** NEL = No Export License required.
***0.1° secant latitude heading accuracy with GNSS aiding.
PAP SPECIFICATION
Typical KONGSBERG µPAP applications :
- Fishery.
- Aquaculture.
- Seabed Survey.
- Seabed Cleaning.
- Marine Research.
- Diving Operations.
- Underwater Construction.
- ROV Operations.
- Shallow Water Seismic.
- Shallow Water Inspection.
- Ocean Renewable Energy.
- Salt to Fresh Water Production.
Read more :