Marine Heavy Transport & Lift III, 24–25 October 2012, London, UK
K Kokkila, ABB Marine & Cranes, Finland
SUMMARY
Some of the semi-submersible heavy lift vessels have special requirements that make electric propulsion an attractive alternative compared to conventional diesel-mechanic solution. These requirements include dynamic positioning, redundancy, and machinery location, space and weight restrictions.
This paper presents electric power plant alternatives including both traditional AC as well as new Onboard DC Grid solutions. In addition to power plant concepts, different propeller and thruster alternatives accompanied with electric propulsion are discussed. These include shaft line propulsion, mechanical thrusters and podded thrusters.
Finally, a reference electric propulsion package for semi-submersible heavy lift vessel is defined and comparison is made between AC and Onboard DC Grid solutions considering installation cost, weight saving and operation cost.
NOMENCLATURE
[Symbol] : [Definition] [(unit)].
AC : Alternating current.
CP : Controllable pitch.
DC : Direct current.
DP : Dynamic positioning.
FO : Fuel oil.
FP : Fixed pitch.
Genset : Engine-generator unit.
HL : Heavy lift/load.
LV : Low voltage (1kV).
MCC : Motor control centre.
MCR : Maximum continuous rating.
MSB : Main switchboard.
MV : Medium voltage (1kV…13kV).
RG : Reduction gear.
Semi-sub : Semi-submersible.
VA : Apparent power (Volt-ampere).
1. INTRODUCTION.
Electric propulsion system is quite normal in recent semi-sub HL vessel designs. According to Sea-web database, 45 “Heavy Load Carrier, semi-sub” vessels have been built or ordered since the year 2000 [1]. About 20 of these vessels are equipped with electric propulsion system. The following chapters present different electric propulsion concepts for semi-sub HL vessels.
2. BASICS OF MECHANICAL AND ELECTRIC PROPULSION.
2.1 DIESEL-MECHANICAL PROPULSION
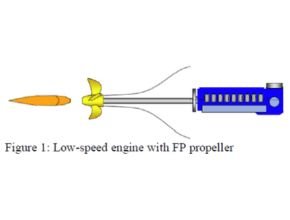
In mechanical propulsion, propeller is powered mechanically by prime mover(s). The simple mechanical example is low-speed engine coupled directly to the FP propeller shaft, see Figure 1. The advantages of this solution are good propeller efficiency and low transmission losses while disadvantages are limited manoeuvrability and relatively slow controllability of propeller power. Thus this is the most common solution for vessels operating mostly in transit mode from port A to port B, such as container ships, crude oil carriers and bulkers.
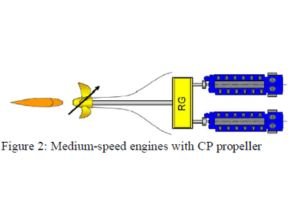
Another solution for smaller vessels is medium speed engine(s) coupled to CP propeller via reduction gear as in Figure 2. The advantages are smaller engine(s) and faster dynamic response while disadvantages being higher transmission losses, lower propeller efficiency, increased losses on partial loads and increased number of rotating mechanical components.
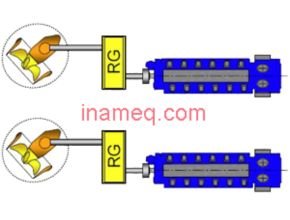
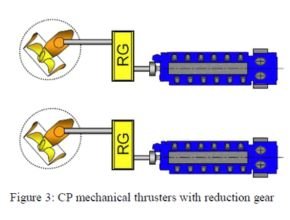
More complex mechanical example is medium speed engines coupled to CP azimuth thrusters via reduction gear and bevel gears as in Figure 3. The further advantages are better manoeuvrability and possibility to eliminate tunnel thruster(s) from aft ship, while disadvantages are higher mechanical gear losses, increased number of rotating mechanical components and typically higher cost compared to shaft line.
2.2 DIESEL-ELECTRIC PROPULSION.
Diesel-electric propulsion example is medium speed engine(s) electrically connected to an electric motor that is installed directly on the FP propeller shaft, either on rudder-shaft line setup or on podded azimuthing thruster (pod). Electric connection between engine and propulsion motor includes generator, switchboard, possibly transformer, frequency converter and necessary cabling between these components, see Figure 4.
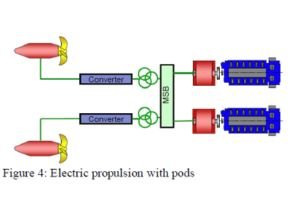
The advantages of electric propulsion are fast control of propeller power and speed, good FP propeller efficiency, high efficiency on partial loads, high freedom on machinery location, high redundancy, and relatively low amount of rotating mechanical components and maintenance therefore. Disadvantages are electrical power conversion losses and typically higher investment cost.
3. DRIVERS FOR ELECTRIC PROPULSION IN SEMI-SUB HL VESSELS.
Depending on type and operation of the HL vessel, electric propulsion may be a feasible option compared to mechanical alternative. The drivers for electric propulsion are (i) self-positioning and redundancy, (ii) limited space and location for propulsion machinery, (iii) high electrical load relative to total installed power and (iv) weight restrictions.
3.1 SELF POSITIONING AND REDUNDANCY.
In order to load and unload the cargo safely, selfpositioning, and possible DP class, may be required from HL vessel. Normally this requires at least tunnel thruster(s) to be installed in fore-ship and (i) azimuthing thrusters in aft-ship as main propulsion or (ii) both shaft lines and tunnel thrusters in aft ship. In addition, fast thrust response times are needed from propellers to overcome changes in current, waves and wind.
With electric propulsion, power transmission is easy to arrange to any part of ship from any genset. Electric power transmission, via cables or bus ducts, is very flexible and has low installation cost compared to long mechanical shafts. Electrical losses in cables are negligible even on over 100m distances. In addition, electric propulsion provides also very rapid response time and fast power share between all consumers.
3.2 LIMITED SPACE AND LOCATION FOR PROPULSION MACHINERY.
In semi-sub HL vessel designs visibility requirement due to large cargo, such as rig, supports navigation bridge and accommodation to be located in the fore ship. In addition, large ballast water capacity is required to load the cargo. Due to these limitations there is often limited space for machinery in the aft-ship. Furthermore, exhaust and inlet air system is challenging to arrange on the aftship. Therefore, it is attractive to place engines and exhaust systems into fore ship making electric power transmission feasible option instead of mechanical shaft lines to transfer power to aft-ship.
3.3 HIGH POWER NEED FOR NONPROPULSION CONSUMERS.
The more electrical power is needed for non-propulsion consumers, the more feasible it is to make propulsion electrical as well. This is to reduce total installed power capacity and avoid separate engines for propulsion and other electric power consumers. This factor is very typical driver, for example, in cruisers, where hotel load including air conditioning for cabins is significant. However, for simple working vessels, this is not usually the main driver for electric propulsion.
In semi-sub HL designs, there are typically quite much auxiliary electric consumers bringing some synergy benefits to when having electric propulsion. Largest nonpropulsion consumers include :
- Ballast water pumps.
- Ballast water treatment.
- Deck machinery.
- Cranes.
- Ventilation fans.
- Compressors.
4. DIFFERENT TYPES OF ELECTRIC PROPULSION.
4.1 TRADITIONAL AC ELECTRIC PROPULSION.
The most common electric propulsion setup is nowadays based on AC machines and AC power distribution. Theuse of DC motors and generators have mostly diminished, except on some special requirement applications such as navy or research vessels, main reasons being lower efficiency and higher maintenance need compared to AC machines.
Typical AC based electric propulsion chain is the following :
- Medium speed engine directly coupled to AC generator running on fixed speed and frequency, eg, 60Hz.
- Switchboard providing (i) protection and fault isolation with breakers and (ii) inputs for several generators and outputs for different consumers.
- Transformer transforming the voltage and current of AC power suitable for propulsion drive.
- Propulsion drive converting the fixed, eg, 60Hz, network frequency to varying frequency to control propulsion motor speed.
- AC propulsion motor converting electrical power to mechanical power to rotate propeller shaft.
4.2 ONBOARD DC GRID ELECTRIC PROPULSION.
New Onboard DC Grid solution was introduced by ABB in 2011. This is based on both AC and DC componentsin order to combine the advantages from the both worlds. The electric propulsion chain in Onboard DC Grid is the following :
- Medium speed engine directly coupled to AC generator running on variable speed, for example, between 40 and 60Hz. Speed is optimised for engine FO consumption on different loads.
- Rectifier unit to convert variable AC to DC.
- DC power distribution to different parts of the vessel via cables or bus duct system.
- Propulsion drive to convert DC to desired AC frequency for propulsion motor.
- AC propulsion motor converting electrical power to mechanical power to rotate propeller shaft.
Instead of providing system protection by centralised switchboard and circuit breakers as in AC system, in Onboard DC Grid the protection distributed and realised by combination of :
- Converter control.
- Fuses.
- Physical isolation.
As of today, ABB have Onboard DC Grid technology available for LV solutions, while traditional AC system is available for both LV and MV.
Onboard DC Grid is also very flexible for alternative power sources such as fuel cells, solar panels and batteries, which all are based on DC. These can be installed also as retrofit in case the competitive situation of fuel sources changes in the future.
5. PROPELLER OPTIONS WITH ELECTRIC PROPULSION.
5.1 SHAFTLINE.
The most common solution for propelling marine vessels is fixed shaft-line propeller accompanied with a rudder. Typically, shaft-line propeller accompanied with electric propulsion is of FP type, since speed can be easily controlled, but also CP can be used. If high thrust close to zero speed is preferred then nozzle propellers are used. In case higher transit efficiency is preferred, then open propeller is chosen.
The most suitable rudder type can be selected according to operation profile, including :
- Semi-balanced rudder (most common type, low cost).
- Full-balanced rudder (more advanced, better efficiency).
- High lift rudder, eg. Schilling (better performance in manoeuvring).
- Flap-type rudder (good manoeuvring and efficiency, more moving parts)
5.2 AZIMUTHING THRUSTERS.
In case advanced manoeuvring or self-positioning capability is required, typical choice is to install azimuthing thrusters as main propulsion in aft-ship and tunnel thruster(s) in fore ship. This gives possibility to take most advantage from main propellers also in DP situation, not just transit, since most of the main propellers thrust can be directed freely to any direction.
By installing azimuthing main propellers to aft-ship also tunnel thrusters in the aft-ship can be avoided. Aft-tunnel thruster performance can be challenge in semi-sub HL due to low height of the skeg. This may result flow recirculation and interaction with main shaft lines reducing effective thrust from the aft-tunnel thrusters.
5.2 (a) Mechanical azimuthing thrusters.
Common types of azimuthing thrusters are mechanical Zand L-drive thrusters, especially on lower power levels, below abt. 5MW. Fundamental advantage of the mechanical thruster type is high gear ratios enabling smaller and faster rotating propulsion motor compared to propulsion motors installed directly on the propeller shaft. In addition, on-board propulsion motor is easily available for maintenance, see Figure 5. However, additional bearings and gears needs to be located in the thruster instead.
5.2 (b) Podded azimuthing thrusters.
Podded azimuthing thrusters (pods), ABB’s Azipod products being the most known, are quite standard solution for high-power cruisers and icebreakers, but less common at lower power levels below abt. 4MW per propeller. The advantages of pods compared to electrically driven Z- and L-drives are :
- Lower mechanical losses.
- Less moving parts.
- Space saving due to absence of on-board propulsion motor and shafting, see Figure 6.
The main disadvantage is typically higher investment cost, especially in the lower power range, due to larger purpose built propulsion motor installed directly on the propeller shaft. For a semi-sub HL design, the space saving is quite important advantage compared to some other vessel types. Eliminating on-board propulsion motors and shaftlines enables more rigid aft-ship hull structure and frees more space for ballast water tanks.
6. ONBOARD DC GRID COMPARED TO AC PROPULSION SYSTEM FOR SEMI-SUB HL VESSEL.
This chapter compares the two different electric propulsion solutions for the specified semi-sub HL reference design.
6.1 REFERENCE VESSEL MAIN PARAMETERS
The selected vessel example is semi-sub HL vessel, with the following main particulars :
- L 170m, B 45m.
- 2 x 4.5MW azimuth main propeller at aft-ship.
- 1 x 1MW tunnel thruster at foreship.
- Required generator capacity 12MW.
6.2 AC PROPULSION SYSTEM
The AC solution for the reference vessel is based on :
- 3 x 4.2MVA MV genset.
- 1 x 1.7MVA auxiliary (harbour) genset.
- 2 x 6.6kV main switchboard.
- 2 x 6.6kV cabling for main propulsion.
- 2 x 5.3MVA propulsion transformer (6.6kV / 2 x 725 V).
- 2 x 6.6kVA LV propulsion drive (AC-DC-AC).
- 2 x 4.5MW Azipod propulsor in aft-ship.
- 1 x 2MW tunnel thruster in fore ship.
- 2 x 2MVA distribution transformers (6.6kV / 440V) for auxiliary consumers such as ballast water pumps.
Please see AC system details in single-line drawing Figure 7.
6.3 ONBOARD DC GRID SYSTEM
Reference Onboard DC Grid system contains :
- 3 x 4MVA LV gensets with integrated AC-DC converter.
- 1 x 1,000V DC bus with a bus-tie breaker and isolators.
- 2 x 1,000V cabling for main propulsion.
- 2 x 4.5MW Azipod propulsor in aft-ship and 2 x 6.6MVA LV propulsion inverter (DC-AC).
- 1 x 2MW tunnel thruster and 1 x 2.7MVA LV inverter (DC-AC).
- 4 x LV multi-converter unit (DC-AC) for most of the large (>15kW) auxiliary motors (2 units in aft ship and 2 units in fore ship).
- 2 x 550kVA inverter (DC-AC) and 2 x 500kVA distribution transformers (1kV / 440V) for small auxiliary consumers such as lightning.
Please see Onboard DC Grid system single-line diagram on Figure 8.
6.4 COMPARISON.
6.4 (a) Installation cost
For the given reference vessel the approximate investment and installation cost of the comparable scope is on the same level (±5%). However, this may differ considerably depending on particular semi-sub HL vessel design making either of the solutions better if based solely on this aspect. Below are the main items that differ the two solutions with regard to installation cost in the reference vessel.
Main AC propulsion cost advantages :
- 6.6kV AC distribution has less propulsion supply cabling in 170m long vessel compared to 1,000V DC distribution.
- Absence of 440V distribution converters.
- Absence of 1,000V isolators.
Main Onboard DC Grid cost advantages :
-
No need for a separate auxiliary genset for harbour use. Due to variable speed gensets, low harbour consumption can be done efficiently with any one of the three main gensets, with competitive FO consumption even below 20% power per engine.
- MV switchgear is not needed.
- Propulsion transformers are not needed.
-
Biggest non-propulsion consumers are fed by DC-AC multi converter units, while in AC solution larger distribution transformers are needed as well as motor control centres.
6.4 (b) Weight and location
The weight attribute has more difference in the reference vessel as Onboard DC Grid solution saves about 20% in weight compared to AC solution in the reference vessel.
Main weight advantages for Onboard DC Grid :
- Absence of the auxiliary genset.
- Absence of the propulsion transformers.
- Smaller distribution transformers.
- Absence of the MV switchgear.
- DC-AC propulsion converters instead of ACDC-AC propulsion converters.
Location of the electric propulsion equipment is an advantage with Onboard DC Grid. There’s no need for separate MSB rooms, since the needed isolators can be located quite freely between the DC bus and the protected input/output.
6.4 (c) Operation cost.
The operation cost difference between AC and Onboard DC Grid solutions depends highly on the operation profile of the given reference vessel. The better efficiency of Onboard DC Grid’s on partial loads is due to variable speed of the engines. Engine speed can be optimised to get the most efficient loading point according to the required power. Further advantages of variable genset engines are the following :
- Reduced Emissions.
- Cleaner combustion.
- Reduced Engine Maintenance.
- New possibilities in optimizing prime-mover and turbo design with fewer restrictions on speed range.
Considering a single engine, on partial loads from 10% to 50% of MCR, FO savings with variable speed genset can be from 5% to 20%. On higher loads, from 80% to 100% MCR, the savings are 0-2%. Please see Figure 9.
Figure 9: FO consumption of single variable speed genset compared to single fixed speed genset [2]. When taking into account the whole power plant with, for example, four gensets, the Onboard DC Grid has 5- 10% better efficiency up to 50% load of installed power and 0-2% between 80-100% load, see Figure 10.
Figure 10 : FO consumption of AC and Onboard DC Grid systems relative to overall power plants load. Four gensets. [2].
In case of DP operation, the efficiency of Onboard DC Grid improves further, since due to redundancy reasons more than one main engine needs to be running.
The resulting annual FO saving depends highly on the operation profile of the vessel. For example, if average transit power is 80% of installed power (2% FO consumption saving) and average DP operation 10% of power (15% FO consumption saving, 2 of 4 engines running on 20% load), total propulsion FO savings with different operation profiles are :
- Time share : 50% DP and 50% transit. FO saving : 8.5%.
- Time share : 10% DP and 90% transit. FO saving : 3.3%.
In case annual FO consumption would be, for example, 10,000 tonnes and FO price $700/tonne, 3.3% lower consumption results annually abt. $230,000 savings on FO cost.
7. CONCLUSIONS
The electric propulsion can be a feasible solution for semi-sub HL vessel design. This is supported by limitations in engine locations, long power transfer distances, large ballast water capacity and limited machinery spaces. Possible self-positioning requirement also supports electric propulsion further as well as high electric power need for non-propulsion consumer.
Electric propulsion can be combined with different propeller types, most simple being shafline main propulsion. In case advanced manoeuvring or selfpositioning is required azimuthing thrusters become a feasible option. Azimuthing thrusters are supported also by possible space limitations since shaft lines, rudders and tunnel thrusters can be eliminated with azimuthing main propulsion. Further, space limitations support pod thrusters compared to mechanical thrusters since onboard main propulsion motors can be eliminated with pods.
Currently, typical electric propulsion concept for semisub HL vessels is based on AC distribution. Based on the defined reference vessel comparison, ABB’s new LV Onboard DC Grid solution can be feasible alternative for MV AC distribution. Longer vessel dimensions support MV AC distribution with lighter cabling while operation with partial loads, weight limitations and limited freedom on location of electric propulsion equipment all support Onboard DC Grid. In addition, with Onboard DC Grid better main engine utilisation is achieved resulting decreased FO consumption and utilisation of any main genset for harbour use.
Source :
- https://new.abb.com,
- © 2012: The Royal Institution of Naval Architects,
- Marine Heavy Transport & Lift III, 24–25 October 2012, London, UK
Read more :